Нелинейные электрические цепи
ВВЕДЕНИЕ
Технические характеристики многих современных устройств техники связи в большой степени зависят от свойств нелинейных электрических цепей. О сложности радиотехнических устройств можно судить по количеству нелинейных цепей, входящих в их состав. Основой работы многих приборов является нелинейность цепи. К таким приборам относятся: усилитель мощности, генератор, детектор, модулятор, умножитель частоты, преобразователь частоты и др. Подходы к методам анализа нелинейных цепей различны. Они, во многом, зависят от необходимой степени точности расчетов, так как, в отличие от линейных цепей, не существует точных решений исходных нелинейных уравнений, а только приближенные. В этом плане методы анализа, например, методы аппроксимации отдельных нелинейных элементов, являются универсальными в силу своей простоты. В то же время множество устройств техники связи довольно сильно привязаны к определенному типу нелинейных цепей, и анализировать их универсальными методами очень трудно. Полное представление о нелинейной цепи любого вида можно получить, лишь изучив её отдельные элементы. При этом, важное значение имеет характеристика или семейство характеристик, общим свойством которых является нелинейность. На основе таких характеристик осуществляется анализ графическим или аналитическим методом. В первом случае необходимо иметь графики характеристик, а воздействие на цепь (элемент) можно иметь либо в виде графиков, либо аналитически. Во втором случае характеристики и воздействия задаются формулами. Следовательно, характеристика аппроксимируется функцией с необходимой степенью точности. На практике, кроме того, получили широкое распространение графо-аналитические методы, не требующие больших затрат времени. Недостатком многих из таких методов является невысокая точность, что чаще всего допускается в типовых расчетах. В настоящее время математическая сторона анализа нелинейных цепей достаточно полно отражена в научных источниках. В связи с этим в данной части учебного пособия математический аппарат рассматривается кратко, преследуя цель лишь ознакомления обучаемых с основами того или иного метода расчета применительно к конкретному изучаемому элементу.
Большое внимание уделено методам нахождения параметров элемента по его статическим вольт-амперным характеристикам и указаны пределы применимости данных методов.
ГЛАВА 1. ГРАФИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ХАРАКТЕРИСТИК НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
Важную роль в расчетах цепей с нелинейными элементами имеют характеристики нелинейного элемента. Основное внимание уделяется вольт-амперным характеристикам (ВАХ), поскольку они отражают зависимость тока, протекающего в данный момент времени, от напряжения. Аналитическое выражение статических ВАХ нелинейного элемента (НЭ) в точном виде практически невозможно, так как зачастую она состоит из нескольких криволинейных участков, описываемых различными функциями. Во многих расчетах применяют графическое определение параметров. Статические ВАХ нелинейных элементов бывают двух типов: однозначные и многозначные. В первом случае одному значению напряжения соответствует одно значение тока, а во втором случае одному значению напряжения соответствует несколько значений тока и наоборот, одному значению тока соответствует несколько значений напряжения. Графическое представление ВАХ делает процесс расчета параметров наглядным. Следует отметить, что, в отличие от линейных элементов, цепи с НЭ не поддаются точному расчету, а только приближенному. Вычерчивание ВАХ во многих методах является первостепенной задачей, поскольку от точности выполнения графика зависит точность нахождения параметров. При изучении графического представления ВАХ следует уделить внимание следующим вопросам.
1. Какие участки характеристик можно считать линейными, а ка
кие нелинейны?
2. Как выбирается точка покоя и рабочий участок?
3. Какие изменения в работу цепи вносит нелинейность ВАХ?
1.1 . Вольт-амперные характеристики диодов
Полупроводниковые диоды нашли широкое применение в нелинейных цепях. На их основе построены такие электронные приборы, как усилители мощности электрических сигналов, преобразователи частоты, генераторы гармонических колебаний, стабилизаторы и многие другие, работа которых возможна только благодаря нелинейным свойствам диодов.
Однако, тип статических нелинейных вольт- амперных характеристик существенно различен для разных типов диодов. Так, например, силовые диоды имеют однозначную ВАХ, а стабилитроны и специальные диоды – многозначные ВАХ различных видов. В частности, статическая ВАХ наиболее широко используемых туннельных диодов многозначная. В связи с подобным существенным различием статических характеристик режимы работы и расчет рабочих параметров диодов различен.
а) Характеристики и параметры силового диода.
Статическая ВАХ силового диода является однозначной. Она во многом аналогична входным характеристикам ламп и биполярных транзисторов. Поэтому на ее примере можно показать основные принципы простейшего графо-аналитического способа определения параметров.
Все параметры нелинейного элемента разделяются на статические, динамические и средние. Все они могут быть вычислены по статическим ВАХ и применяются в зависимости от поставленной задачи.
На рис.1.1. представлена статическая ВАХ силового диода.

Рис. 1.1. Вольт-амперная характеристика силового диода
Из рисунка видно, что это кривая линия, так как диод – нелинейный элемент. Теоретически ВАХ выражается формулой:
i = ad(ebuq/kT – 1), (1. 1)
где:
i - ток;
u - напряжение;
q - заряд носителя электрического заряда (электрона или дырки);
ad - коэффициент диффузионного тока;
b - постоянная диффузионного тока;
k - постоянная Больцмана;
Т - абсолютная температура (в градусах Кельвина).
Практически эта формула хорошо выполняется только в средней части ВАХ. Вблизи нулевого напряжения и при очень больших напряжениях (режим насыщения) наблюдаются существенные отступления от формулы (1.1). На рис. 1.1. эти участки показаны пунктиром.
В статическом режиме по диоду протекает постоянный ток. Напряжение и сила тока не изменяются во времени. Этому режиму соответствует некоторая точка на ВАХ (u0,i0).
В этом случае можно вычислить статическое внутреннее сопротивление диода и, соответственно, статическую крутизну (см. ч.1 стр.26-27).
В динамическом режиме через диод протекает переменный ток, величина напряжения и тока изменяются во времени. От перепадов напряжения будет зависеть способ вычисления крутизны. Крутизна в данном случае является динамическим параметром и ее величина не будет одинаковой для всех точек характеристики. Для полного расчета динамического режима всю ВАХ условно разбивают на участки: от 0 до точки А – нелинейная часть; от точки А до точки Б – прямолинейная (линейная) часть; выше точки Б – нелинейная часть. От А до Б - длина отрезка, который считают (аппроксимируют) прямой линией. Она в большой степени зависит от требуемой точности расчетов.
Если наименьшая и наибольшая величина тока в динамическом режиме соответствуют линейному участку, то вычисленная крутизна не отличается от статической, поскольку она равна тангенсу угла наклона прямой к оси абсцисс.
Если же хотя бы один из уровней напряжения (тока) выходит за пределы участка А-Б, то необходимо вычислять собственно динамическую крутизну.
Часто в электрических цепях через НЭ протекают две составляющие тока: постоянная и переменная, причем переменный ток представляет собой гармоническое колебание (так называемый моногармонический режим или одночастотное устройство). В этом случае статическая крутизна, соответствующая постоянной составляющей тока относится к точке Т0, называемой точкой покоя.
S0 =

где дифференциалы тока и напряжения:



i0 и u0 – ток и напряжение постоянной составляющей.
Точка ВАХ, соответствующая разности постоянного тока и амплитуды переменного тока - нижняя точка рабочего участка (Т1).
u1 = u0 - Umaxcos(


i1= i0 - Imaxcos(
Точка, соответствующая сумме постоянной составляющей и амплитуды переменной составляющей тока – верхняя точка рабочего участка (Т2).
u2 = u0 + Umaxcos(
i2= i0 + Imaxcos(
Таким образом, рабочий участок расположен на статической ВАХ от точки Т1 до точки Т2. В приборах класса А точку покоя Т0 выбирают в середине рабочего участка.
Для тех режимов, рабочий участок которых находится в пределах линейной части ВАХ, крутизна неизменна и равна статической крутизне. Во всех других случаях следует учитывать изменение крутизны. Т.е. применять динамическую крутизну.
Строго говоря, на практике, между током и напряжением в нелинейных цепях существует разность фаз, так как сопротивление цепи величина комплексная:
Это значит, что максимум тока достигается не в тот же момент, что и максимум напряжения, из-за чего точное вычисление динамических параметров, прежде всего крутизны, весьма затруднено.
В практических расчетах часто используются средние параметры, так как более точно отражают протекающие процессы. Рассмотрим понятие средней крутизны.
Переменная составляющая напряжения в гармоническом и символическом (комплексном) виде:
Umaxcos(
где:
Umax – мгновенная амплитуда напряжения;
Umax еj
Аналогично, переменная составляющая тока в гармоническом и символическом виде:
Imaxcos(
где:
Imax – мгновенная амплитуда тока;
Imax еj
Динамическая крутизна, по определению, равна отношению:
Si =
Средняя крутизна, согласно определению, вычисляется для отдельной гармоники как отношение средней комплексной амплитуды тока данной гармоники к комплексной амплитуде напряжения.
Ввиду того, что наибольший вклад во многих устройствах вносит первая гармоника, Ю.Б.Кобзарев предложил средней крутизной считать отношение средней комплексной амплитуды тока основной (первой) гармоники к комплексной амплитуде ее напряжения:

В расчетах именно эта величина и будет определяться графически по статическим ВАХ. Если реактивные составляющие НЭ таковы, что разность фаз


Сравнивая понятия параметров, можно сделать вывод, что при уменьшении амплитуды переменной составляющей средняя крутизна стремится к дифференциальной.
Существуют следующие правила использования параметров: если рабочий участок несколько больше линейной части статической ВАХ (u<0,2u0), то применяют динамические параметры; если же амплитуда переменного напряжения велика (одного порядка с u0), то применяют средние параметры.
Динамическая крутизна отличаются по величине от статической и от средней в нелинейном режиме работы. Существует несколько способов учета этого различия. Наиболее типичным является разложение в ряд Тейлора динамической крутизны относительно статической крутизны:
Si = S0 + S/ (u–u0) +


+

где S/, S//, . . ., S(n) – производные крутизны по напряжению, соответственно, первого, второго и более высоких порядков;
С учетом разложения (1.3) получим выражение, связывающее ток с напряжением:
i = (S0 +

В простейшем случае достаточно ограничиться первой производной, в более точных расчетах учитываются и высшие производные.
i = (S0 +
б) Характеристики и параметры туннельного диода.
ВАХ многих специальных диодов относятся к многозначной.
Такие характеристики бывают двух типов: N-образные и S-образные, что показано на рис. 1.2.

Рис.1.2 . Многозначные ВАХ: а) N-образная; б) S-образная.
N-образной характеристике одному напряжению соответствует несколько токов. В S –образной характеристике нескольким напряжениям соответствует один ток.
ВАХ туннельного диода N-образная. Она имеет перегиб, которому соответствует отрицательное внутреннее сопротивление. Именно этот участок ВАХ и используется в работе, потому что в таком режиме туннельный диод обладает усилительными свойствами. На рис.1.3. представлена ВАХ туннельного диода, на которой показаны точки линейного рабочего участка.

Рис. 1.3. Вольт-амперная характеристика туннельного диода
Статическая ВАХ туннельного диода теоретически выражается суммой двух экспонент:
i = atue-Вu + ad(ebqu/kT – 1) (1.6)
где:
u - напряжение;
at - коэффициент туннельной составляющей тока;
В - константа, характеризующая туннельные свойства данного диода;
ad - коэффициент диффузионной составляющей;
b - константа, характеризующая данный диод;
q - заряд носителя;
k - постоянная Больцмана;
Т - абсолютная температура (в градусах Кельвина).
Первая экспонента в (1.6) описывает ВАХ при малых напряжениях (до перегиба), а вторая – при больших напряжениях (после перегиба). Однако, на практике есть отклонения от этой формулы в области очень малых и максимальных токов.
Для расчета параметров используются различные аппроксимирующие функции, так как эта статическая ВАХ полностью нелинейна. Подбором экспонент можно добиться совпадения до 6%, но этот метод очень трудоемкий и редко применим на практике. Если амплитуда напряжения динамического режима мала (u<0,1u0), где u0-напряжение статического режима (постоянной составляющей), то рабочий участок (Т1–Т2 ) считают линейным.
ВЫВОДЫ:
1. Статические вольт-амперные характеристики полупроводнико-
вых диодов нелинейны и не могут быть точно выражены аналитически.
2. Для характеристики режимов работы НЭ используют статичес-
кие, динамические и средние параметры. Основным параметром явля-
ется крутизна.
3. В зависимости от амплитуды переменного напряжения выбира- ется тип параметров, применяемых в расчете: для малых амплитуд – статическая и динамическая крутизна; для больших амплитуд - средняя крутизна.
1.2. Характеристики электровакуумных ламп.
Как известно, электровакуумные лампы обладают нелинейными ВАХ. Теоретически вольт-амперная характеристика вакуумного диода подчиняется закону «степени трех вторых»:
i = aлu3/2, (1.7)
где aл - коэффициент, зависящий от экземпляра лампы.
Электровакуумные стабилитроны и тиратроны имеют S–образные характеристики.
Лампы с сетками имеют несколько статических ВАХ, из которых в расчетах, чаще всего, используются выходные и проходные.
На рис.1.4 показаны: а) управляющие (анодно-сеточные) ВАХ и б) выходные (анодные) ВАХ электровакуумного триода, имеющие нелинейный характер.
Аналогично полупроводниковому диоду на ВАХ (рис.1.4) отмечены: линейный участок (А-Б), в котором можно считать крутизну неизменной (статической) и участки, где необходимо учитывать нелинейность, т.е. вычислять динамическую или среднюю крутизну. Т1-Т2 – рабочий участок, для которого показано графическое определение приращений тока и напряжения.

Рис.1.4. Статические ВАХ электровакуумного триода.
ВЫВОДЫ:
1. Статические вольт-амперные характеристики радиоламп имеют
нелинейный вид. Теоретическая зависимость тока от напряжения вы-полняется лишь при средних напряжениях.
2. Для приближенного расчета режимов работы НЭ графически
определяют крутизну по управляющим и выходным статическим ВАХ лампы.с учетом перепадов напряжения.
3. В расчетных формулах дифференциалы заменены приращения-
ми, определяемыми графически.
1.3. ВАХ биполярных транзисторов
Параметры биполярного транзистора (БТ) в режиме переменного сигнала называются дифференциальными. Они выведены из теории четырехполюсников в предположении слабых по амплитуде сигналов невысокой частоты (эти величин индивидуальны для каждого БТ).
Биполярный транзистор имеет семейства статических характеристик: входные и выходные. Для расчета динамического режима используются дифференциальные проводимости, уравнения которых для эквивалентной схемы с генераторами тока, имеют вид:
Im1=g11Um1+ g12Um2; Im2=g21 Um1+g22Um2, (1.8)
где:
Im1 и Um1 - амплитуды входного тока и входного напряжения, соответственно;
Im2 и Um2 - амплитуды выходного тока и выходного напряжения, соответственно;
g11 - входная проводимость;
g22 - выходная проводимость;
g12 – проводимость обратной связи;
g21 – проводимость управления (крутизна).
Уравнения (1.8) показывают, что входной ток Im1 складывается из тока, созданного входным напряжением Um1 на элементе схемы g11, и тока, возникающего во входной цепи от напряжения Um2 за счет обратной связи. Выходной же ток Im2 складывается из усиленного тока: g21 Um1 и тока, создаваемого на элементе схемы g22 напряжением Um2. Таким образом, g21 Um1 - ток, учитывающий усиление БТ; а
g12 Um2 - ток, учитывающий обратную связь в БТ.
Графическим методом можно вычислить дифференциальные проводимости: g11 и g12 по входным ВАХ, а g21 и g22 - по выходным ВАХ. В зависимости от режима работы и требуемой точности каждая из проводимостей может быть динамической или средней.
Динамическая проводимость:
gi =
Средняя проводимость:
gср = Imax. ср еj
Разложение в ряд Тейлора до третьего члена:
gi = g0 + g/ (u–u0) +
где:
g0 – статическая проводимость (в точке покоя);
g/, g// – первая и вторая производные.
В этом приближении ток выражается через напряжение в виде:
i = (g0 +
В простейшем случае ограничиваются первой производной разложения:
i = (g0 +
Для переменной составляющей входного напряжения u

i = g0u
На рис.1.5 представлены входные статические ВАХ биполярного транзистора и отмечены линейные (А-Б) и нелинейные участки.

Рис.1.5. Входная ВАХ биполярного транзистора.
ВЫВОДЫ:
1. Все параметры биполярных транзисторов определяются по ста-
тическим входным, выходным и управляющим вольт-амперным ха- рактеристикам аналогично диодам
2. Стический и динамический режимы задаются амплитудой пере-
менного напряжения на входе биполярного транзистора: малый сигнал – статический режим; большой сигнал – динамический режим.
3. Основными параметрами являются дифференциальные прово-
димости, а также соответствующие им сопротивления.
ГЛАВА 2. АППРОКСИМАЦИЯ ХАРАКТЕРИСТИК НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
Прежде, чем проводить расчет сложных электрических цепей необходимо определить параметры самого НЭ. В предыдущей главе были описаны общие свойства статических ВАХ и простейший метод определения величин основных параметров с использованием графически представленных вольт-амперных характеристик. Часто требуется получить решение задачи в общем виде, не связанном с конкретными численными значениями параметров, то есть, в виде формул, отражающих зависимость тока, протекающего через НЭ, от напряжения, воздействующего на него. В таком случае используется аналитический метод на основе определения математической формулы, описывающей характеристику с достаточной степенью точности. Такие методы называются аппроксимацией.
Широкое применение на практике нашли методы подбора подходящих приближенных (аппроксимирующих) функций: степенного многочлена, экспоненты, отрезков прямых линий и др. Аппроксимирующие функции позволяют аналитически определять параметры НЭ. Всю ВАХ условно разбивают на участки, соответственно режиму работы. Каждый участок может быть использован не только для графического, но и для аналитического определения параметров. При изучении этих методов следует уделить внимание следующим вопросам: 1. Как выбрать аппроксимирующую функцию при аналитичес-
ком расчете?
2. Как определить положение рабочих точек и выполнить пост-
роение для вычисления коэффициентов графо-аналитическом расчете?
3. Какой метод расчета выбрать для динамического режима
большого сигнала?
2.1. Общие сведения о выборе метода расчета и аппроксимации
В общем случае к нелинейному элементу, работающему в аппара-
туре, приложено напряжение (воздействие), имеющее две составляющие: постоянную и переменную. Это напряжение и определяет рабочую область НЭ.
Расчет любого режима работы НЭ начинают с нахождения на статических ВАХ точек рабочего участка, соответствующего той части характеристики, которая охвачена приложенным воздействием. Для расчета не обязательно строить точки графически, но можно знать их координаты.
При рассмотрении линейных элементов отмечалась независи-
мость их собственных параметров от внешнего воздействия: напряжения, тока температуры и др. Особенностью всех НЭ является зависимость параметров от величины приложенного напряжения и протекающих токов. Эта зависимость, в большинстве динамических режимов, как правило, не выражается прямой линией.
Например: Пусть НЭ имеет квадратичную зависимость между током и напряжением:
i = a2u 2, u >0 (2.1)
где a2 – постоянный коэффициент.
Тогда проводимость цепи равна: G =

а крутизна ее характеристики S=

Оба эти параметра зависят от напряжения, а к цепи в целом не применим принцип суперпозиции (см.Часть1, стр.24-25).
На рис.2.1 приведена входная ВАХ биполярного транзистора, на которой показаны изменения формы сигналов при нелинейном динамическом режиме работы. Воздействие u(t)=U0+Umaxcos

Рис.2.1. Режимы работы биполярного транзистора
Как видно из рисунка, большой сигнал подвергся сильным нелинейным изменениям. Изменение формы малого сигнала невелико, так как мала амплитуда входного переменного напряжения.
Как известно, любой сложный сигнал можно представить в виде ряда Фурье, первый член которого и есть основная гармоника. Она выражает гармоническое воздействие на НЭ. В динамическом режиме в выходной сигнал добавились более высокие частоты – высшие гармоники. На практике обычно отсеивают высшие гармоники с помощью фильтров.
Строго говоря, в выходном сигнале всегда добавляются высшие гармоники из-за нелинейности ВАХ, и их вклад будет тем больше, чем больше приложенное воздействие. В практических расчетах различают динамические режимы по величине приложенного к НЭ напряжения.
а) Динамический режим малого сигнала.
Малыми считаются сигналы, при которых выходной сигнал одного порядка с величиной статического входного сигнала (u0).
В этом случае можно использовать статические параметры.
б) Динамический режим большого сигнала дает сильные нелинейные искажения, требующие учета высших гармоник.
В этом режиме используется средняя крутизна Sср, согласно вы- ражению (1.2).
Методы расчета параметров НЭ, представлены на рис.2.2.

_
Рис.2.2 Классификация методов расчета
При графическом методе анализа характеристика НЗ и воздействие задаются в виде графиков. Форма выходного сигнала определяется путем построения третьей проекции по двум данным (рис.2.3).

Рис.2.3. Графическое определение реакции НЭ
Недостаток этого метода в том, что невозможно получить точной количественной оценки
При аналитическом методе воздействие и характеристика заданы в виде формул. Определение реакции НЭ делается математическими методами. Метод дает точный количественный результат и применяется в настоящее время для машинного расчета.
При графо-аналитическом методе характеристика НЭ задается графически, а воздействие аналитически. Так как воздействие является функцией времени, то для каждого момента времени параметры рассчитываются с помощью графика.
ВЫВОДЫ:
1. В зависимости от амплитуды переменного воздействующего на-
напряжения в динаминамическом режиме выходной сигнал обогаща- ется высшими гармониками.
2. Существует несколько типов динамического режима работы НЭ,
и, сответственно этому, несколько методов расчета параметров.
3. Динамический режим малого воздействующего сигнала имеет
параметры статического режима. Расчет динамического режима боль-шого сигнала на практике производится аналитически или графо-анали- тически.
2.2. Аппроксимация характеристик многочленом
Для определения реакции НЭ, выражаемой силой тока, на воздействие, выражаемое входным напряжением, часто выбирают аппроксимирующую функцию в виде многочлена. Т.е. статическую ВАХ заменяют степенным многочленом с необходимой степенью точности.
i(t) = f (u), (2.2)
где:
i(t) - ток (реакция);
u(t) - напряжение (воздействие);
f (u) = f (u,t) - функция, в общем случае, нелинейная.
На практике для аналитического описания этой зависимости стремятся реальную характеристику НЭ заменить приближенной более простой. В этом и состоит задача аппроксимации.
Из курса математики известно, что любая функция может быть описана сколь угодно точно бесконечным степенным рядом вида:
i(t) = а0 + а1u + а2u2 + а3u3 + . . . + аnun + . . . . (2.3)
Задача аппроксимации сводится к определению значений коэффициентов полинома, которые являются производными крутизны.
а0 =S0 ; а1=S/ ; а2 =
В различных практических задачах требуется разная точность расчетов. Часто многочлен достаточно ограничить двумя-тремя первыми членами.
i(t) = а0 + а1u + а2u2 . (2.4)
В зависимости от цели исследования цепи можно пользоваться укороченным рядом, используя только квадратичный член, отражающий наименьшие нелинейные эффекты. В некоторых задачах используют укороченный многочлен третьей степени:
i(t) = а0 + а3u3;
i(t) = а0 + а1u + а3u3. (2.5)
Порядок вычислений. Аппроксимирующая и аппроксимируемая зависимости приравниваются в отдельных, определенным образом специально выбранных точках, которые принято называть узловыми. В остальных точках совпадение аппроксимирующей функции с ВАХ лишь приближенное.
а) Аппроксимация полиномом первой степени.
Полином первой степени iап(t)=а0 + а1(u-u0) - используется для аппроксимации нелинейных участков, что показано на рис.2.4 для проходной статической ВАХ полевого транзистора (ПТ) с управляющим p-n переходом и каналом n-типа.

Рис.2.4. Аппроксимация ВАХ полиномом первой степени.
В уравнении два неизвестных коэффициента а0 и а1. Для их определения необходимо, чтобы аппроксимирующая прямая iап(t)=а0 + а1u (Е0=0) проходила через точку с координатами (i=i0 и u=u0) и имела крутизну линейного участка характеристики. Это, согласно определению, статическая крутизна S=S0.
Для определения коэффициентов аппроксимирующей функции получим два уравнения:
i0=а0 + а10,


Отсюда имеем:
а0 =i0 ; а1= S и ток равен: iап(t) = i0 + S0 u.
б) Аппроксимация полиномом второй степени
Полином второй степени iап(t) = а0 + а1(u-u0) + а2(u-u0)2.
Этот полином позволяет учесть нелинейность начального участка ВАХ., что показано на рис.2.5 для полевого транзистора (ПТ) со структурой металл-диэлектрик-полупроводник (МДП-структура) с собственным каналом n-типа.

Рис.2.5. Аппроксимация начального участка ВАХ
Для определения аппроксимирующих коэффициентов а0, а1 и а2 необходимо, чтобы iап(t) совпала с i в трех узловых точках:
N1 (u=u1; i=i1); N2 (u=u2; i=i2); N3 (u=u3; i=i3).
Тогда имеем систему уравнений:
i1 = а0 + а1(u1-u0) + а2(u2-u0)2
i2 = i0 = а0
i3 = а0 + а1(u3-u0) + а2(u3-u0)2
Решение этой системы трех уравнений дает значения коэффициентов.
Аппроксимация характеристик НЭ степенными полиномами широко применяется как наиболее общий, универсальный метод. Повышение степени аппроксимирующего полинома позволяет повысить точность расчетов. Таким образом, в каждом конкретном случае можно использовать определение коэффициентов с требуемой точностью.
Выбор количества членов и степени полинома зависит от типа ВАХ. Так для туннельного диода можно использовать только полиномы нечетных степеней, начиная с третьей. Характеристика большинства специальных диодов имеет перегиб, т.е. является нечетной функцией. Практически установлено, что аппроксимация полиномом одиннадцатой степени дает расхождение iап(t) от i(t) не более 3%.
ВЫВОДЫ:
1. Аппроксимация степенным полиномом дает возможность опре-
делить коэффициенты (производные крутизны) с необходимой точностью.
2. В зависимости от типа ВАХ выбирается четная или нечетная
функция для аппроксимации: силовые диоды, транзисторы и лампы позволяют использовать полиномы второй степени.
3. Для вычисления коэффициентов полинома составляются уравне-
ния реакции НЭ для нескольких специально выбранных точек.
2.3. Аппроксимация других видов.
Наиболее часто также применяется на практике аппроксимация экспоненциальной функцией и отрезками прямых.
а) Аппроксимация экспонентой.
Наиболее подходит этот метод для ВАХ силового, туннельного или специального диода. Её представляют функцией:
iап(t) = iап(u) = АeВu .
Для двух произвольных узловых точек на ВАХ получим:
i1 = iап1(u1) = А eВu1 ,
i2= iап2(u2) = АeВu2 .
Возьмем отношение этих токов:


Затем по формуле для любого из токов i1 или i2 вычисляют коэффициент А.
Аналогично можно провести аппроксимацию функцией
iап = А( ue-Вu – 1), (2.6)
где коэффициент А выражает постоянную составляющую тока. На графике это соответствует параллельному переносу экспоненты вдоль оси ординат.
б) Аппроксимация отрезками прямых линий
Применяя для аппроксимации ВАХ многочлен первой степени, фактически полностью заменяют всю характеристику прямой линией, не принимая во внимание некоторые нелинейные участки при очень малых и очень больших напряжениях (токах). Этот метод – линейная аппроксимация – дает недостаточно точные результаты для динамического диапазона, при котором велики токи и напряжения.
Несмотря на указанный недостаток, метод линеаризации ВАХ широко используется для расчета параметров усилителей класса А, в которых рабочий участок НЭ не выходит за пределы точек А и Б рис.1.1.
Однако, в существенно нелинейных приборах не допустимо столь грубое приближение аппроксимирующей функции к реальной ВАХ.
Большую точность можно получить, если аппроксимировать характеристику нелинейного элемента несколькими отрезками прямых линий.
Как правило, аппроксимацию одного и того же типа необходимо произвести как для входных, так и для выходных и управляющих характеристик нелинейного элемента. Часто аппроксимируют только рабочий участок, а не характеристику полностью.
В простейшем случае методом линеаризации определяют параметры только двух участков ВАХ, а в общем случае можно определять параметры любого количества участков (линейно-кусочная аппроксимация). Чем больше количество участков, тем выше точность аппроксимации.
Рассмотрим это на простейшем примере аппроксимации двумя отрезками прямых управляющей ВАХ полевого транзистора с индуцированным каналом n-типа – рис.2.6.

Рис.2.6. Аппроксимация двумя отрезками прямых
Как следует из рис.2.6 аппроксимирующая функция имеет вид:
iап = 0 при U<E

iап = S (U-E
где:
S - крутизна наклонного (прямолинейного) участка;
E
Коэффициенты аппроксимации определяются непосредственно по характеристике.
Аналогично для выходных ВАХ того же ПТ (рис.2.7.)

Рис.2.7. Аппроксимация выходных ВАХ ПТ
В области малых напряжений на стоке (UС от 0 до UС.min) стоковый ток iС почти не зависит от напряжения на затворе. Поэтому в этой области ВАХ аппроксимируют прямой называемой линией граничного режима (ЛГР). Она проводится из начала координат в точку максимального перешиба характеристики, соответствующей максимальному току, при котором будет работать ПТ.
Уравнение этой прямой:
iап.С = Sгр UС,
где
Sгр=

Правее ЛГР выходной ток ПТ (iС ) является линейной функцией двух переменных: напряжения стока UС и напряжения затвора UЗ. Она имеет вид:
iап.С = АUЗ + ВUС+С, (2.7)
где:
А, В - коэффициенты, с размерностью крутизны;
С - коэффициент, имеющий размерность тока.
Реальные характеристики заменяются семейством параллельных прямых, отстоящих на одна от другой на равных расстояниях при одинаковых приращениях напряжения на затворе. Наклон их определяется наклоном «базовой» характеристики, соответствующей (0,7-0,8) iС.max.
«Базовая» характеристика спрямляется до линии граничного режима, а все остальные проводятся параллельно ей. Расстояние между ними выдерживается равными интервалу между «базовой» и соседними ней характеристиками.
Определим коэффициенты А, В, С в выражении (2.7).
Так как крутизна S =

и внутреннее сопротивление R


Тогда выражение для тока стока:
iап.С = S UЗ + UС /R
Если UЗ = ЕЗ
С = -( S ЕЗ
Подставим (2.8) и (2.9) в (2.7) и получим:
iап.С = S [UЗ – ЕЗ

Это и есть аппроксимирующая функция правее ЛГР, в которой:
S - крутизна управляющей характеристики;
ЕЗ
ристике пересекающей ось абсцисс в точке UС=ЕС (i.С= 0);

Дифференциальные параметры: S, ЕЗ
Полное выражение аппроксимированных выходных характеристик имеет вид:
0 при UС<0
iап.С Sгр UС на ЛГР
S[UЗ - ЕЗ
ВЫВОДЫ:
1. Аппроксимация нелинейного режима работы достаточно точно
осущеществляется одной экспоненциальной функцией, суммой двух экспонент или суммой прямой линии с экспонентой.
2. Линеаризация ВАХ применяется в двух вариантах: замена ха-
рактеристики двумя отрезками прямых линий и линейно-кусочная ап-роксимация несколькими отрезками прямых.
3. Коэффициенты аппроксимирующих прямых и параметры НЭ определяются графически.
ГЛАВА 3. АНАЛИЗ РЕЖИМОВ РАБОТЫ НЕЛИНЕЙНОГО ЭЛЕМЕНТА .
Целый ряд радиотехнических каскадов и, в первую очередь, усилители мощности работают в динамическом нелинейном режиме большого сигнала или же в режиме с отсечкой тока. Последний позволяет существенно повысить КПД устройства, однако приводит и к возрастанию амплитуд высших гармоник выходного сигнала, т.е. к возрастанию нелинейных искажений по сравнению с режимом без отсечки тока. Выдающийся советский ученый А.И.Берг в 30-х годах ХХ века разработал метод расчета каскадов, работающих в режиме с отсечкой тока. Этот метод широко применяется и в настоящее время как для расчетов ламповых, так и транзисторных каскадов.
Рассмотрение угла отсечки позволяет усвоить основы этого метода. Кроме того, в процессе вычисления параметров по методу А.И.Берга анализируются особенности работы НЭ, имеющие большое значение при выборе области применения данного нелинейного элемента. При изучении методов расчета режима, использующих тот или иной вид аппроксимации статических вольт-амперных характеристик, следует уделить внимание следующим вопросам:
1. Как с необходимой точностью выбрать аппроксимирующую
функцию?
2. Как графически выполнить построение рабочего участка и вы-
брать точку покоя для осуществления расчетного режима работы НЭ?
3. Каким способом определяются коэффициенты аппроксими-
рующей функции по заданным вольт-амперным характерситикам?
4. Как проверить степень точности аппроксимации?
3.1. Работа без отсечки тока
В этом динамическом режиме работы входное напряжение имеет большие амплитуды, вследствие чего рабочий участок охватывает существенно нелинейные области ВАХ. Форма сигналов при этом искажается – рис.2.1. Режим работы не моногармоничекий. Воздействие с одной (основной) гармоникой на входе приводит к появлению высших гармоник на выходе. Задача расчета заключается в определении амплитуд гармоник, имеющих значение для работы прибора. Такой расчет называется гармоническим анализом, использующим разложение в ряд Фурье как воздействия, так и реакции НЭ.
Из математики известно, что если периодическая функция удовлетворяет условиям Дирихле, т.е она непрерывна, монотонна и имеет производные высших порядков в данном интервале, то её можно представить функциональным рядом Фурье. Для переменной составляющей выходного тока НЭ он имеет вид:

где:



В динамическом режиме рабочий участок имеет нелинейные части, ток, протекающий через НЭ, выражается суммой ряда и постоянной составляющей:
i(t) = I0 + Imax.1 cos
где для простоты опущены начальные фазы гармоник.
Аналогично можно представить многочлен аппроксимирующей функции тока, если на вход воздействует косинусоидальное напряжение: iап(t) = а0 + а1(u-u0) + а2(u-u0)2 + а3(u-u0)3 +. . .
Заменим разность напряжений его гармоническим выражением:
iап (t) = а0 + а1 Umaxcos
Возведем в необходимые степени, после чего воспользуемся тригоно-метрическими соотношениями:
cos2

cos3


cos4


После всех преобразований получим:
iап (t) = (а0 +


+ (а1U




+ (
+ (

= I0 +

где
I0=а0 +
Imax.1=а1U
Imax.2 =
Imax.3 =
Всего в данном ряду (разложении) будет столько гармоник кратных
Следует отметить, что средняя крутизна данного режима, вычисленная графически, приобретает дополнительную погрешность из-за неучета вклада высших гармоник. Анализ показывает, что величина погрешности обратно пропорциональна добротности, т.е чем выше добротность, тем меньше погрешность. Как известно, качество элемента тем лучше, чем выше его добротность.
На практике широко используются два графо-аналитических метода расчета режима без отсечки тока: трех ординат и пяти ординат.
а) Метод трех ординат
Пусть на входе НЭ, характеристика которого задана графически – рис.3.1, действует напряжение: u1 = u0 + Umax cos

Рис.3.1. Расчет режима методом трех ординат
Пусть требуется определить постоянную составляющую I0 и амплитуду первых двух гармоник Imax.1 и Imax.2.
В этом случае ряд ограничивается первыми тремя членами:
i(t) = I0 + Imax.1cos
Для определения трех неизвестных выберем на графике три ординаты: i1 при

i2 при

i3 при
Подставим значения этих трех токов и соответствующие им значения аргумента в формулу (3.1)
i1 I 0+ Im1 + Im2
i2 I 0- Im2
i3 I 0- Im1 + Im2
Решая систему относительно I 0, Im1, Im2 получим формулы, известные под названием формулы трех ординат:
I 0=(i1+i3+2i2)/4;
Im1 =(i1- i3)/2;
Im2=(i1+i3-2i2)/4.
Следует отметить, что ограничение ряда Фурье первыми двумя членами приводит к ошибке в определении амплитуд гармоник, так как полином второй степени неточно отображает характеристику в заданном интервале. Если возникает необходимость определить гармоники более высоких порядков, то прибегают к более точным методам.
б) Метод пяти ординат
На рис.3.2. отмечены пять ординат этого метода, позволяющие вычислить I 0, Im1, Im2, Im3, Im4. Для каждой точки составляется уравнение тока, а затем решается полученная система из пяти уравнений с пятью неизвестными.

Рис.3.2. Метод пяти ординат.
i1 при
i2 при

i3 при
i4 при
i5 при
Решение системы дает формулы пяти ординат:
I 0=[i1+i5+2(i2+ i4)]/6;
Im1 =(i1- i3 + i2 - i4)/3;
I m2=(i1+i5-2i3)/4;
I m3=[i1-i5-2(i2-i4)]/6;
Im4 =[i1+ i5 - 4(i2+ i4) +6i3]/12.
Методы: трех и пяти ординат очень просты и применяются часто для оценки нелинейности в усилителях. Однако, при сильной нелинейности точности этих методов не достаточно. Для большей точности используют коэффициент гармоник:
КГ =

Этот коэффициент показывает энергетическое соотношение вкладов высших гармоник относительно первой (основной) гармоники.
Если измерения позволяют определить только амплитуды напряжений гармоник, или мощности отдельных гармоник, то в этом случае применяются следующие формулы для вычисления коэффициента гармоник:
КГ =

КГ =

ВЫВОДЫ:
1. Для расчета динамического режима применяется гармоничес-
кий анализ, целью которого является определение амплитуд постоянной составляющей, первой и высших гармоник.
2. Большое распространение получили два графо-аналитических
метода: метод трех ординат и метод пяти ординат.
5. При высокой степени нелинейности статических ВАХ приме-
няют коэффициент гармоник, дающий большую точность вычислений.
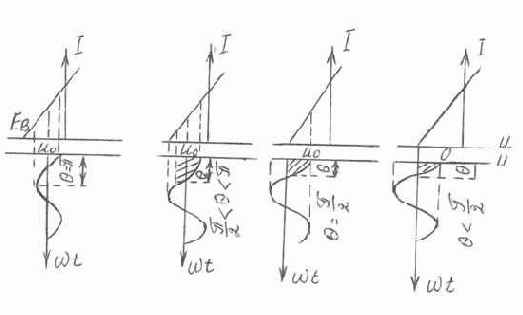
3.2 . Анализ работы НЭ в режиме с отсечкой тока
До сих пор рассматривался такой режим работы, при котором минимальная величина воздействующего напряжения превосходила напряжение запирания (Umin>E

Рис.3.3. Форма сигнала в режиме с отсечкой тока
Как видно из этого рисунка, ток представляет собой последовательность импульсов.
Рассмотрим работу НЭ в режиме большого сигнала, когда статические ВАХ можно аппроксимировать отрезками прямых. Аналитическое выражение аппроксимирующей функции имеет вид:
iап = 0 при U<E
iап = S (U- E
а воздействующее напряжение: u = u0 + Umax cos
Так как воздействие периодическое, то и выходной ток (сигнал) – периодическая функция, представляющая собой последовательность косинусоидальных импульсов. Импульсы тока характеризуются двумя основными параметрами: амплитудой Imax и углом отсечки

Как видно из рис.3.3, угол отсечки – это значение аргумента выходного сигнала, отсчитываемое от момента, когда выходной ток достигает максимума до момента, когда ток становится равным нулю («отсекается» при воздействующем напряжении равном напряжению запирания). При
При этом напряжение принимает вид: E
откуда cos

причем, все напряжения берутся алгебраически (со своими знаками). Эта формула позволяет определить величину угла отсечки по известным: E
При
Вычитая (3.3.) из (3.4.), получим:
i = SUmax(сos
При
Imax = SUmax(1 - cos
Эти формулы используют для определения амплитуд гармоник по методу угла отсечки.
Разложим в ряд Фурье (3.5):
Imax.1 =


=
= S Umax
- cos
Отношение амплитуды первой гармоники к максимальной:


Это выражение зависит только от угла отсечки и обозначается

Аналогично составим отношения для других составляющих выходного тока:


Отношение амплитуды любой гармоники (k>2) к максимальной:

Коэффициенты (3.11) называются коэффициентами разложения косинусоидального импульса (коэффициенты Берга). Они рассчитаны и сведены в таблицы или определяются по специальным графикам, показанным на рис.3.5.

Рис.3.5. Коэффициенты Берга.
Из графика видно, что амплитуды гармоник максимальны при вполне определенных (оптимальных) углах отсечки:

где k – номер гармоники.
Из рис.3.5 видно, что Imax.1 максимальна при 1200, Imax.2 максимальна при 600, Imax.3 максимальна при 400 и т.д.
Таким образом, выбирая режим работы НЭ можно обеспечить в выходном токе максимальную амплитуду той или иной гармоники.
Расчет работы диода производится в следующем порядке.
1) По известным E
cos
2) По формуле (3.7) Imax = S Umax
характеристики (рис.3.4) определяется максимум выходного тока сигнала.
3) По таблицам или графику (рис.3.5) находятся коэффициенты Берга
для соответствующего угла отсечки.
4) Амплитуда любой гармоники определяется по формуле
Imax.k=
Следует отметить, что расчет выходного тока транзистора методом угла отсечки несколько отличается от вышеприведенного расчета диода. Причина в инерционности процесса протекания тока в транзисторе: на протяжении периода переменного воздействия в базе БТ происходит накопление и рассасывание электрического заряда. Поэтому угол отсечки коллекторного тока в области высоких частот


И вычисление амплитуды гармоник тока коллектора производится по следующим формулам:
IК0 =
IКmax1 =
В общем виде:
IКmaxk =
ВЫВОДЫ:
1. Расчет динамического режима методом угла отсечки нашел ши-
рокое применение благодаря простоте расчета и достаточной точности.
2. Расчет проводится с помощью статической ВАХ , динамической
(средней) крутизны, угла отсечки и коэффициентов Берга.
3. При рассчете цепей с биполярным транзистором учитывается инерционность протекания тока и накопление электрического заряда в базе.
ЗАКЛЮЧЕНИЕ
В этой части пособия было показано, что полное представление о нелинейной цепи складывается из рассмотрения нелинейных свойств её отдельных элементов. Выяснено, при каких условиях работы того или иного электронного элемента можно применять линейные методы расчета параметров цепи, и в каких случаях необходимо пользоваться положениями нелинейной теории. Строго говоря, все элементы нелинейны, и выбор метода расчета во многом зависит от требуемой точности определения параметров.
Основными параметрами являются статические, средние и динамические параметры: крутизна, проводимость и сопротивление. Эти параметры можно определить по известным вольт-амперным характеристикам. Вычисления осуществляются графическими и аналитическими методами. В отличие от линейных цепей, исходные нелинейные уравнения не могут быть решены точно, а лишь приближенно. Графические методы отличаются простотой, но требуют графического изображения характеристик и воздействия. Их недостатком является малая точность, а достоинством экспрессность. Аналитические методы предпочтительны в тех случаях, когда требуется более высокая точность, получение решения задачи в общем виде и при задании характеристик и воздействия в виде формул. Аналитические методы позволяют программированное выполнение вычислений, что находит широкое применение благодаря экономии времени. На практике для аналитических методов расчета применяют различные виды аппроксимации вольт-амперных характеристик, особенно часто используют аппроксимацию полиномом первой, второй и третьей степени. Воздействие представляется суммой двух составляющих: постоянной и гармонической. Полином первой степени позволяет определить параметры элемента в режиме слабого воздействия, при котором амплитуда переменной составляющей мала по сравнению со смещением. Полином второй степени описывает начальный участок ВАХ, а полином третьей степени необходим для расчета верхнего загиба ВАХ силовых диодов, транзисторов и ламп, а также для полной аппроксимации ВАХ тунельного диода. Расчет динамических режимов работы НЭ в условиях сильного сигнала производится графо-аналитическими методами трех, пяти ординат и методом угла отсечки. Эти методы относятся к гармоническому анализу, который позволяет определить амплитуды гармоник, появившихся на выходе цепи, т.е являющихся реакцией нелинейного элемента. На основании проведенного анализа можно сделать вывод, что номер высшей гармоники совпадает с высшей степенью аппроксимирующего полинома. Все методы расчета, рассмотренные в этой части пособия, будут в дальнейшем применены к сложным цепям.
ЛИТЕРАТУРА
Гоноровский И.С. Радиотехнические цепи и сигналы. - М.: Радио и связь, 1986. - 512 с.
Конторович М.И. Нелинейные колебания в радиотехнике (автоколебательные системы). – М.: Советское радио, 1973. – 320 с.
Мейке М., Гудлах Ф. Радиотехнический справочник. Том 2. Перевод с немецкого. - М.-Л.: Госэнергоиздат, 1962. - 576 с.
Фролкин В.Т., Попов Л.Н. Импульсные и цифровые устройства. – М.: Радио и связь, 1992. – 336 с.
Шинаков Ю.С., Колодяжный Ю.М. Основы радиотехники. – М.: Радио и связь, 1983. – 320 с.
